
Paper: “Soft Robotic Oscillators with Strain-Based Coordination,” Steven Ceron, Marta An Kimmel, Alexandra Nilles, and Kirstin Petersen, International Conference on Intelligent Robots and Systems (IROS), 2021.
Abstract: Many modular robots and active matter platforms are inspired by natural aggregates of single-celled organisms that exhibit complex emergent behaviors far beyond the capability and range of individuals. These behaviors stem primarily from short range chemical and mechanical interactions. Past work has focused largely on wireless communication akin to chemicals, however, physical interactions require a shift from rigid to soft, durable robots capable of inducing and measuring strain. Here, we present a platform to support such studies. The hardware consists of stand-alone, soft, pneumatic robots capable of radial expansion and contraction. The robots are cheap and fast to produce; they have 3 directional strain sensors, and 6 magnet pairs to loosely couple with their neighbors.We characterize force profiles, sensors, elastic modulus, magnetic interaction, as well as exploratory aggregate motions. Finally, we demonstrate their ability to synchronize, locomote, and fracture in a complimentary quasi-static simulator, with a coupled oscillator model, and discuss evaluation metrics. We hope that this platform will serve to further insights on how simple physical interactions between locally informed agents may lead to complex emergent behaviors.
Abstract: Many modular robots and active matter platforms are inspired by natural aggregates of single-celled organisms that exhibit complex emergent behaviors far beyond the capability and range of individuals. These behaviors stem primarily from short range chemical and mechanical interactions. Past work has focused largely on wireless communication akin to chemicals, however, physical interactions require a shift from rigid to soft, durable robots capable of inducing and measuring strain. Here, we present a platform to support such studies. The hardware consists of stand-alone, soft, pneumatic robots capable of radial expansion and contraction. The robots are cheap and fast to produce; they have 3 directional strain sensors, and 6 magnet pairs to loosely couple with their neighbors.We characterize force profiles, sensors, elastic modulus, magnetic interaction, as well as exploratory aggregate motions. Finally, we demonstrate their ability to synchronize, locomote, and fracture in a complimentary quasi-static simulator, with a coupled oscillator model, and discuss evaluation metrics. We hope that this platform will serve to further insights on how simple physical interactions between locally informed agents may lead to complex emergent behaviors.

Paper: "Scalable and Robust Fabrication, Operation, and Control of Compliant Modular Robots,” Nialah Wilson*, Steven Ceron*, Logan Horowitz, and Kirstin Petersen, Frontiers in Robotics and AI, 2020.
Abstract: A major goal of autonomous robot collectives is to robustly perform complex tasks in unstructured environments by leveraging hardware redundancy and the emergent ability to adapt to perturbations. In such collectives, large numbers is a major contributor to system-level robustness. Designing robot collectives, however, requires more than isolated development of hardware and software that supports large scales. Rather, to support scalability, we must also incorporate robust constituents and weigh interrelated design choices that span fabrication, operation, and control with an explicit focus on achieving system-level robustness. Following this philosophy, we present the first iteration of a new framework toward a scalable and robust, planar, modular robot collective capable of gradient tracking in cluttered environments. To support co-design, our framework consists of hardware, low-level motion primitives, and control algorithms validated through a kinematic simulation environment. We discuss how modules made primarily of flexible printed circuit boards enable inexpensive, rapid, low-precision manufacturing; safe interactions between modules and their environment; and large-scale lattice structures beyond what manufacturing tolerances allow using rigid parts. To support redundancy, our proposed modules have on-board processing, sensing, and communication. To lower wear and consequently maintenance, modules have no internally moving parts, and instead move collaboratively via switchable magnets on their perimeter. These magnets can be in any of three states enabling a large range of module configurations and motion primitives, in turn supporting higher system adaptability. We introduce and compare several controllers that can plan in the collective's configuration space without restricting motion to a discrete occupancy grid as has been done in many past planners. We show how we can incentively redundant connections to prevent single-module failures from causing collective-wide failure, explore bad configurations which impede progress as a result of the motion constraints, and discuss an alternative “naive” planner with improved performance in both clutter-free and cluttered environments. This dedicated focus on system-level robustness over all parts of a complete design cycle, advances the state-of-the-art robots capable of long-term exploration.
Abstract: A major goal of autonomous robot collectives is to robustly perform complex tasks in unstructured environments by leveraging hardware redundancy and the emergent ability to adapt to perturbations. In such collectives, large numbers is a major contributor to system-level robustness. Designing robot collectives, however, requires more than isolated development of hardware and software that supports large scales. Rather, to support scalability, we must also incorporate robust constituents and weigh interrelated design choices that span fabrication, operation, and control with an explicit focus on achieving system-level robustness. Following this philosophy, we present the first iteration of a new framework toward a scalable and robust, planar, modular robot collective capable of gradient tracking in cluttered environments. To support co-design, our framework consists of hardware, low-level motion primitives, and control algorithms validated through a kinematic simulation environment. We discuss how modules made primarily of flexible printed circuit boards enable inexpensive, rapid, low-precision manufacturing; safe interactions between modules and their environment; and large-scale lattice structures beyond what manufacturing tolerances allow using rigid parts. To support redundancy, our proposed modules have on-board processing, sensing, and communication. To lower wear and consequently maintenance, modules have no internally moving parts, and instead move collaboratively via switchable magnets on their perimeter. These magnets can be in any of three states enabling a large range of module configurations and motion primitives, in turn supporting higher system adaptability. We introduce and compare several controllers that can plan in the collective's configuration space without restricting motion to a discrete occupancy grid as has been done in many past planners. We show how we can incentively redundant connections to prevent single-module failures from causing collective-wide failure, explore bad configurations which impede progress as a result of the motion constraints, and discuss an alternative “naive” planner with improved performance in both clutter-free and cluttered environments. This dedicated focus on system-level robustness over all parts of a complete design cycle, advances the state-of-the-art robots capable of long-term exploration.
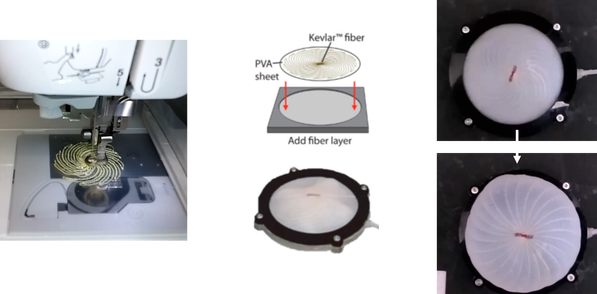
Paper: "Fiber Embroidery of Self-Sensing Soft Actuators," Steven Ceron, Itai Cohen, Robert Shepherd, James Pikul, and Cindy Harnett, 2018, Biomimetics 3 (3): 24–37.
Abstract: Natural organisms use a combination of contracting muscles and inextensible fibers to transform into controllable shapes, camouflage into their surrounding environment, and catch prey. Replicating these capabilities with engineered materials is challenging because of the difficulty in manufacturing and controlling soft material actuators with embedded fibers. In addition, while linear and bending motions are common in soft actuators, rotary motions require three-dimensional fiber wrapping or multiple bending or linear elements working in coordination that are challenging to design and fabricate. In this work, an automatic embroidery machine patterned Kevlar™ fibers and stretchable optical fibers into inflatable silicone membranes to control their inflated shape and enable sensing. This embroidery-based fabrication technique is simple, low cost, and allows for precise and custom patterning of fibers in elastomers. Using this technique, we developed inflatable elastomeric actuators embedded with a planar spiral pattern of high-strength Kevlar™ fibers that inflate into radially symmetric shapes and achieve nearly 180° angular rotation and 10 cm linear displacement.
Abstract: Natural organisms use a combination of contracting muscles and inextensible fibers to transform into controllable shapes, camouflage into their surrounding environment, and catch prey. Replicating these capabilities with engineered materials is challenging because of the difficulty in manufacturing and controlling soft material actuators with embedded fibers. In addition, while linear and bending motions are common in soft actuators, rotary motions require three-dimensional fiber wrapping or multiple bending or linear elements working in coordination that are challenging to design and fabricate. In this work, an automatic embroidery machine patterned Kevlar™ fibers and stretchable optical fibers into inflatable silicone membranes to control their inflated shape and enable sensing. This embroidery-based fabrication technique is simple, low cost, and allows for precise and custom patterning of fibers in elastomers. Using this technique, we developed inflatable elastomeric actuators embedded with a planar spiral pattern of high-strength Kevlar™ fibers that inflate into radially symmetric shapes and achieve nearly 180° angular rotation and 10 cm linear displacement.
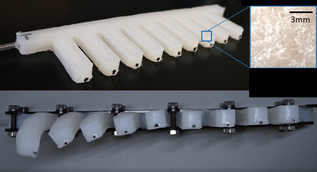
Paper: “Leveraging Fluid Resistance in Soft Robots," Chaim Futran, Steven Ceron, Benjamin MacMurray, Robert Shepherd, Kirstin Petersen, IEEE International Conference on Soft Robotics, Livorno, 2018.
Abstract: A key advantage to Fluidic Elastomer Actuators (FEA) is that they permit easy fabrication of robots capable of sophisticated manipulation and mobility. This advantage arises primarily from the continuous stretching and relaxation of elastomeric material that defines an active degree of freedom (DOF), prescribed during the manufacturing process. While the low elastic moduli of the soft material allows for infinite passive DOFs, each active DOF typically requires a valve and/or pump. On-board valving adds weight and size to the robots, and off-board valving requires tubing that imparts resistance to flow and requires higher pressure differentials for reasonable actuation velocities. In contrast to these methods, the work presented here exploits fluidic resistance in poroelastic foam actuators to create a traveling wave using only a single valve and pressure inlet. This concept is evaluated with respect to foam volume and fluid viscosity, and further demonstrated in a three-legged robot capable of millipede-inspired locomotion. The robot is capable of traveling at ~1.1 mm/s, with individual legs (closest to the inlet) extending 41.28, 27.36, and 12.95 mm. These results represents an important step towards increasingly complex behavior in soft robots that remain simple to fabricate and control.
Abstract: A key advantage to Fluidic Elastomer Actuators (FEA) is that they permit easy fabrication of robots capable of sophisticated manipulation and mobility. This advantage arises primarily from the continuous stretching and relaxation of elastomeric material that defines an active degree of freedom (DOF), prescribed during the manufacturing process. While the low elastic moduli of the soft material allows for infinite passive DOFs, each active DOF typically requires a valve and/or pump. On-board valving adds weight and size to the robots, and off-board valving requires tubing that imparts resistance to flow and requires higher pressure differentials for reasonable actuation velocities. In contrast to these methods, the work presented here exploits fluidic resistance in poroelastic foam actuators to create a traveling wave using only a single valve and pressure inlet. This concept is evaluated with respect to foam volume and fluid viscosity, and further demonstrated in a three-legged robot capable of millipede-inspired locomotion. The robot is capable of traveling at ~1.1 mm/s, with individual legs (closest to the inlet) extending 41.28, 27.36, and 12.95 mm. These results represents an important step towards increasingly complex behavior in soft robots that remain simple to fabricate and control.
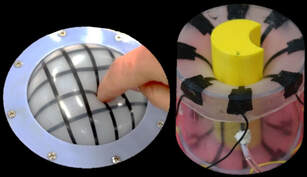
Paper: "Simple, Low-Cost Fabrication of Soft Sensors for Shape Reconstruction," Danna Ma*, Steven Ceron*, Gregory Kaiser, and Kirstin Petersen, IEEE Robotics and Automation Letters 2020.
Abstract: Shape reconstruction by soft sensors may be useful in applications ranging from precision agriculture to haptics and factory automation due to the potential for low-cost fabrication, durable operation, and safe and compliant interaction. Current prevalent techniques, however, require expertise, expensive materials, and high-end processing equipment which limits both their transition to practice and their accessibility to researchers. To address this issue, we present easily accessible, low-cost, and rapid fabrication techniques for soft and resistive carbon composite sensors. We characterize their repeatability and durability in response to stretch up to 135%. We further show how this fabrication technique may be easily customized to two different applications, including a stretchable, tactile interface for passive sensing, and an active, soft pneumatic gripper that can fully encompass an object to reconstruct its shape.We complement these with simple control and analysis, and show how to achieve high relative accuracy, despite the high manufacturing tolerances of the sensors
Abstract: Shape reconstruction by soft sensors may be useful in applications ranging from precision agriculture to haptics and factory automation due to the potential for low-cost fabrication, durable operation, and safe and compliant interaction. Current prevalent techniques, however, require expertise, expensive materials, and high-end processing equipment which limits both their transition to practice and their accessibility to researchers. To address this issue, we present easily accessible, low-cost, and rapid fabrication techniques for soft and resistive carbon composite sensors. We characterize their repeatability and durability in response to stretch up to 135%. We further show how this fabrication technique may be easily customized to two different applications, including a stretchable, tactile interface for passive sensing, and an active, soft pneumatic gripper that can fully encompass an object to reconstruct its shape.We complement these with simple control and analysis, and show how to achieve high relative accuracy, despite the high manufacturing tolerances of the sensors
